AMR自走車SLAM導航軟體客製化設計
AMR影片分享
關於CoRo SLAM軟體說明
CoRo SLAM是 鈳洛數位 CoRo Digital 開發的一款用於AGV/AMR的建圖和驅動的導航軟體。包含三支主程式: Client, PathEdit, AGV_linux。
關於軟體授權
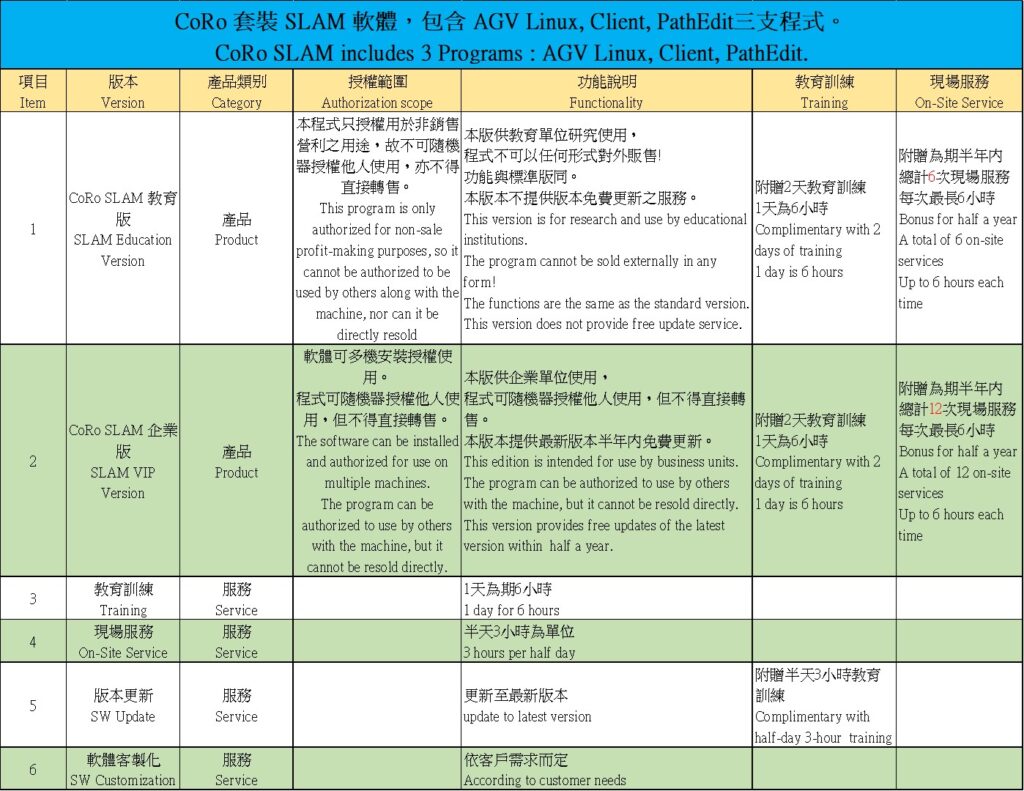
銷售方式主要是授權CoRo SLAM軟體的使用權,一次性付費,並給于註冊密碼。購買者即為被授權單位,被授權單位可以重複安裝和使用本軟體。
授權範圍與禁止事項
被授權單位可隨所銷售之機器協助機器購買者安裝註冊使用。被授權單位不得直接轉售軟體使用權或授權他人使用之行為。註冊密碼僅供初始購買者使用,不允許第三方註冊使用。
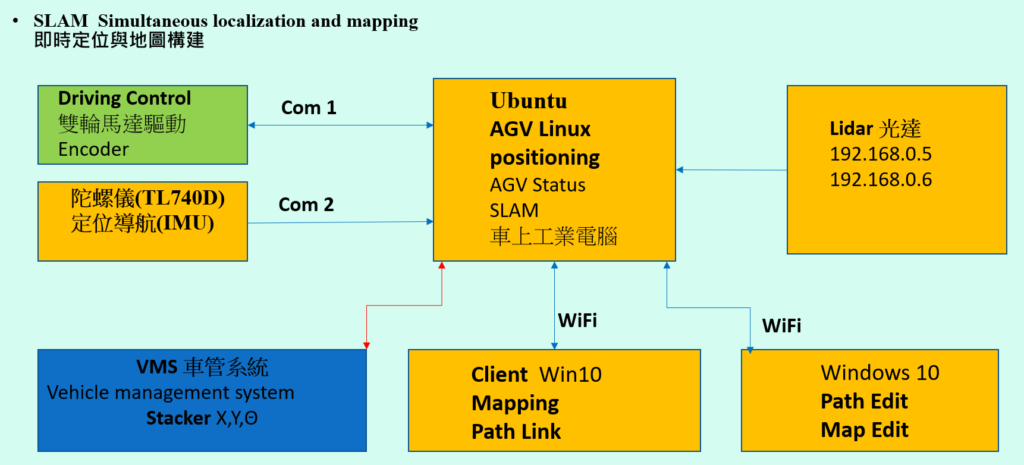
SLAM簡介
Simultaneous localization and mapping
即時定位與地圖構建
AGV AMR 無人搬運車 , 雷射導航 , 地圖定位導航
Lidar Slam Navigation 雷達導引
* 激光雷達 SICK Lidar 或 PEPPERL+FUCHS Lidar
* 定位精度(+/-)2cm , Enable OdoFilter(+/-)1cm
* AMR AGV移動速度1m/sec
* 路徑規劃可選擇多重路徑PathLink或AB兩點最短規劃路線
* 前進,後退,原地旋轉,避障距離調整
* 激光雷達可選擇單一激光雷達或雙激光雷達定位
* 提供2種建圖方法(1)即時建圖(2)收集資料結束後再計算資料建圖
* 地圖資料可匯出,匯入Text File
* 支援車輪定位Odometry,編碼器與陀螺儀(TL740D)定位導航(IMU),
* 支援反光板定位Reflector
* 支援十張地圖,可分樓層使用
* 支援回環地圖誤差修正 LoopClosure


Mapping 建圖
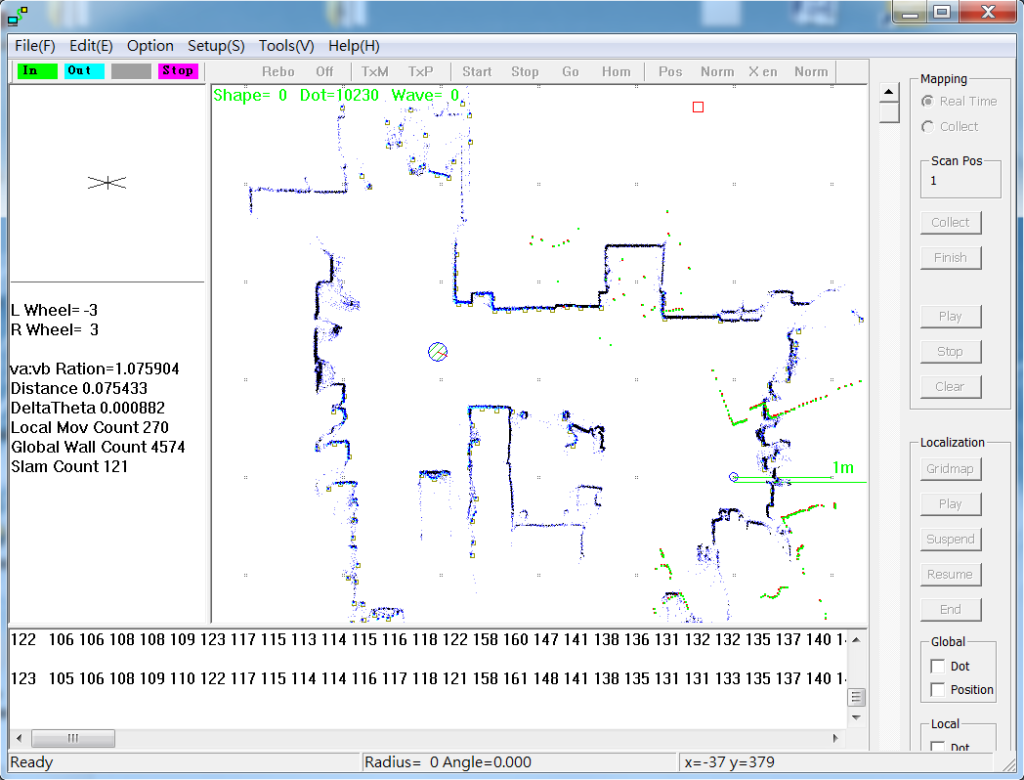
機器人室內地圖建立,使用Wifi遙控機器人,滑鼠遙控技術
使用SLAM技術,ICP(Iterative Closest Point)演算法,
將每張掃描的地圖疊合,一步一步完成整個空間地圖
當室內環境完全掃描後,輸入至編輯軟體,再進行路徑規劃
建圖方式有二種:
1.即時式建圖: 機器人走過路徑,沿途即時建圖
2.收集式建圖: 機器人走完全程後,運算收集的資料完成建圖`
支援LoopClosure,反光板
Localization &Navigating
定位&導航
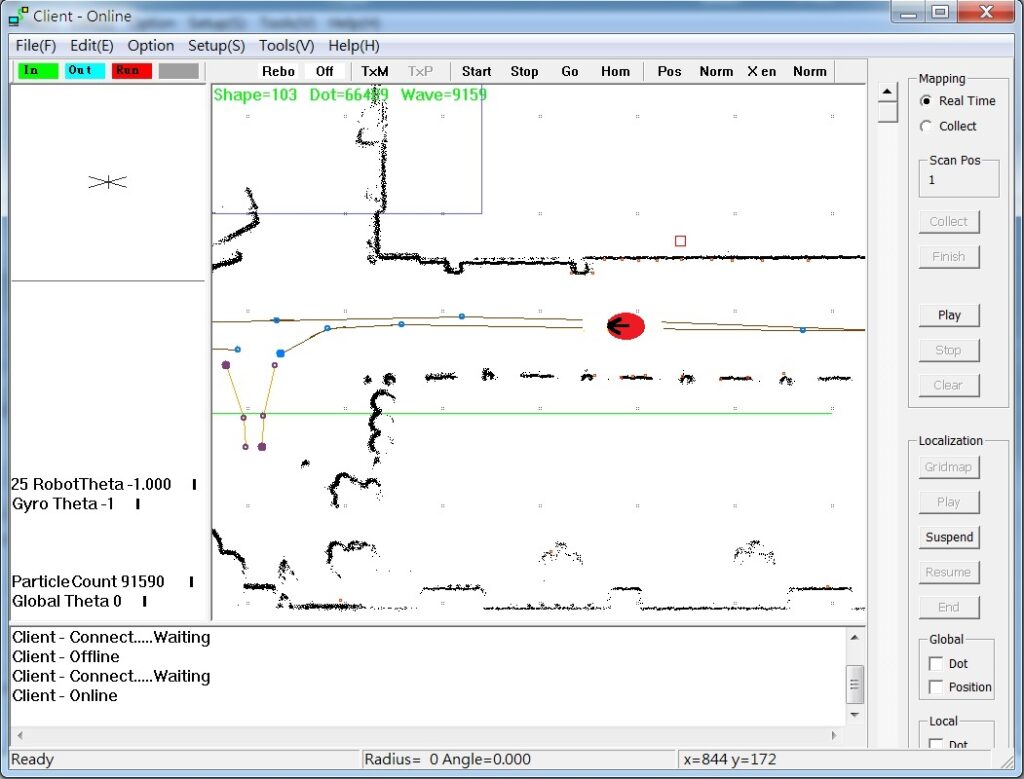
機器人的定位技術的發明,大大的推進科技里程碑,
從家用掃地機,無人搬運車,到未來的機器人都必須使用到,
機器人透過機器人的眼睛,360/270度的激光雷達,掃描空間
再比對先前建立好的地圖得知機器人座標在地圖中哪裡,
透過Client應用程式,時時刻刻監控掌握機器人正在何處,將會去哪裡
使用 Particle Filter 演算法計算座標,快速又好用的演算法
無人搬運車在感測器被遮避時會自動切換到米輪(雙輪)定位
暫時使用車輪定位,搬運車可持續移動,移動到感測器重新辨認出
地形後會切換回雷射激光雷達定位
Robot AGV 無人搬運車路線規劃,機器人速度可調,曲線路徑更流暢
不使用磁條,不需施工,系統安裝方便
路徑規劃更有彈性,使用電腦規劃路徑
機器人自動導航時可使用雷射區域防護,有警告與警急停止
PathEdit 路徑編輯
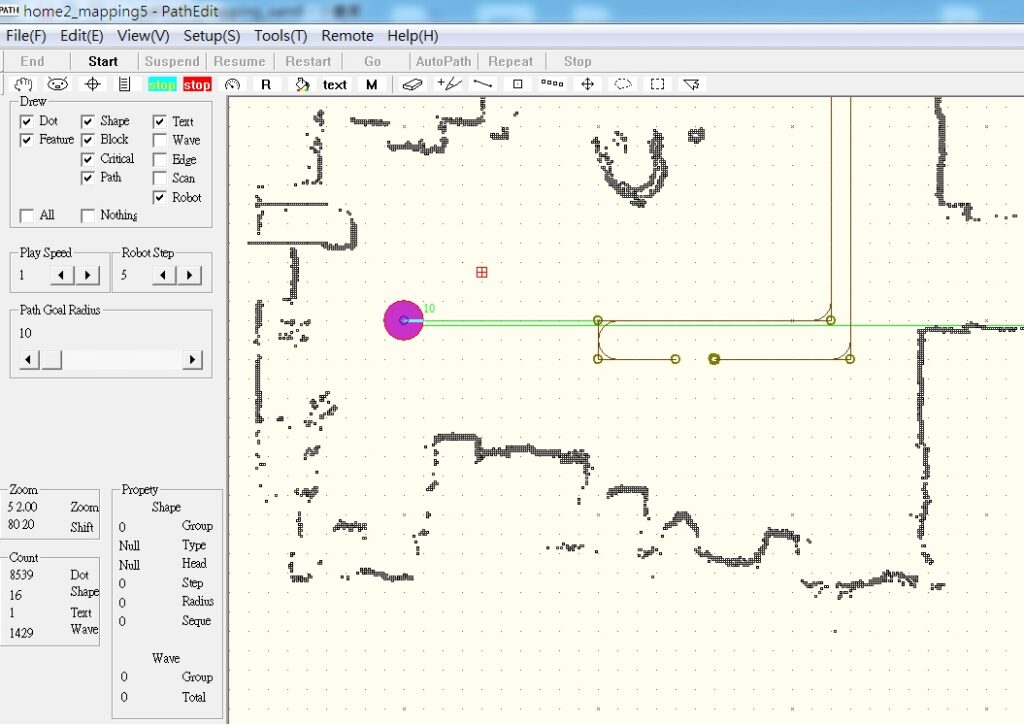
Path planning and edit
PathEdit路徑編輯器是專業的SLAM編輯軟體
或是增加,移除,修改地圖內容,可快速完成機器人路徑
使用匯出(EXPORT)或匯入(IMPORT)文字檔的功能,再使用文字編輯器修改內容
讓資料處理更有彈性,透明性,編輯性
SLAM 功能區塊圖
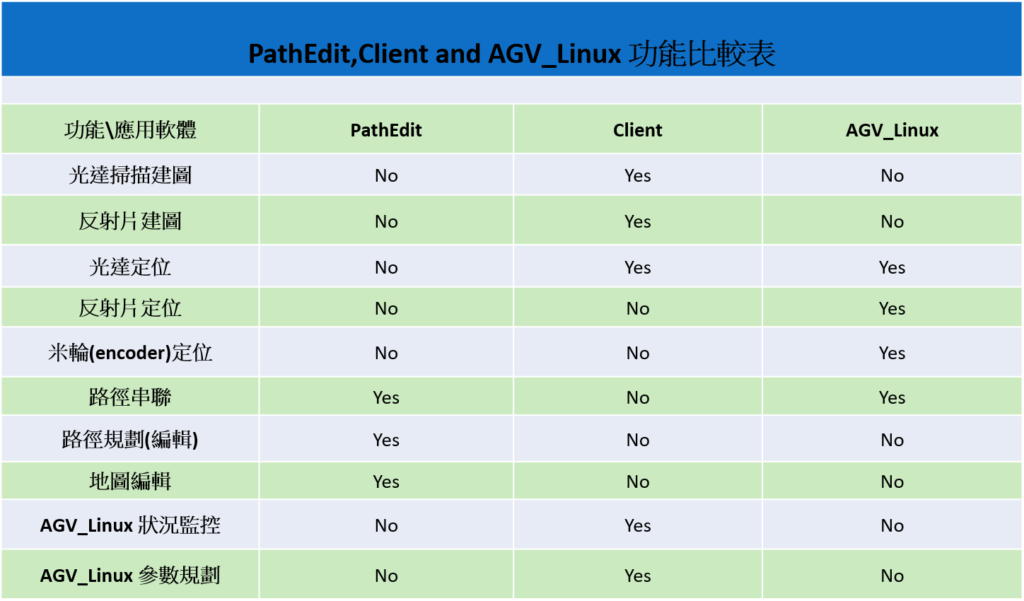
3應用程式比較表
產品 & 授權範圍
配備建議
建議使用無風散電腦I7-6600U或Atom-E3845,需有兩個RS232兩個Ethernet,Memory8~16G
車輪定位Odometry,編碼器(1024 pulses)與陀螺儀(TL740D)定位導航(IMU)
Lidar : 360/270度的激光雷達