CoRo SLAM
AMR Video Demo
About CoRo SLAM Software
AGV / AMR Lidar_Mapping_Navigating SLAM Software
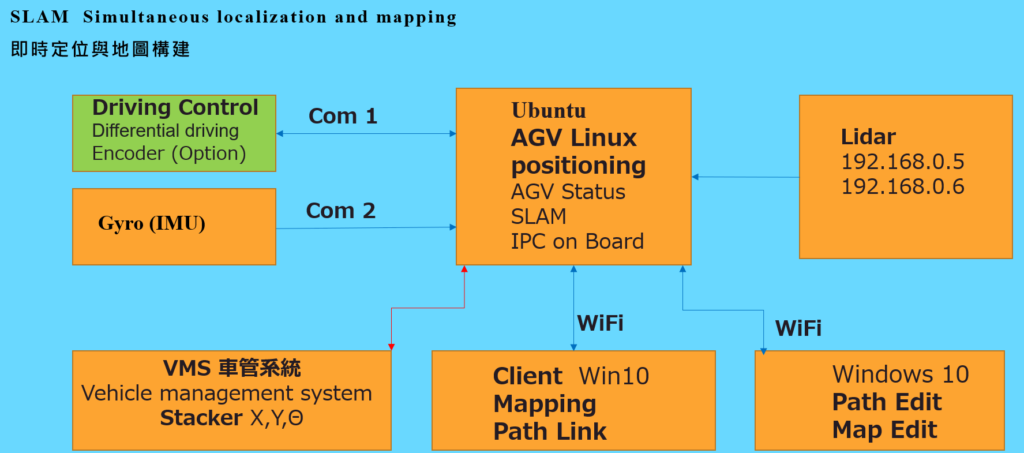
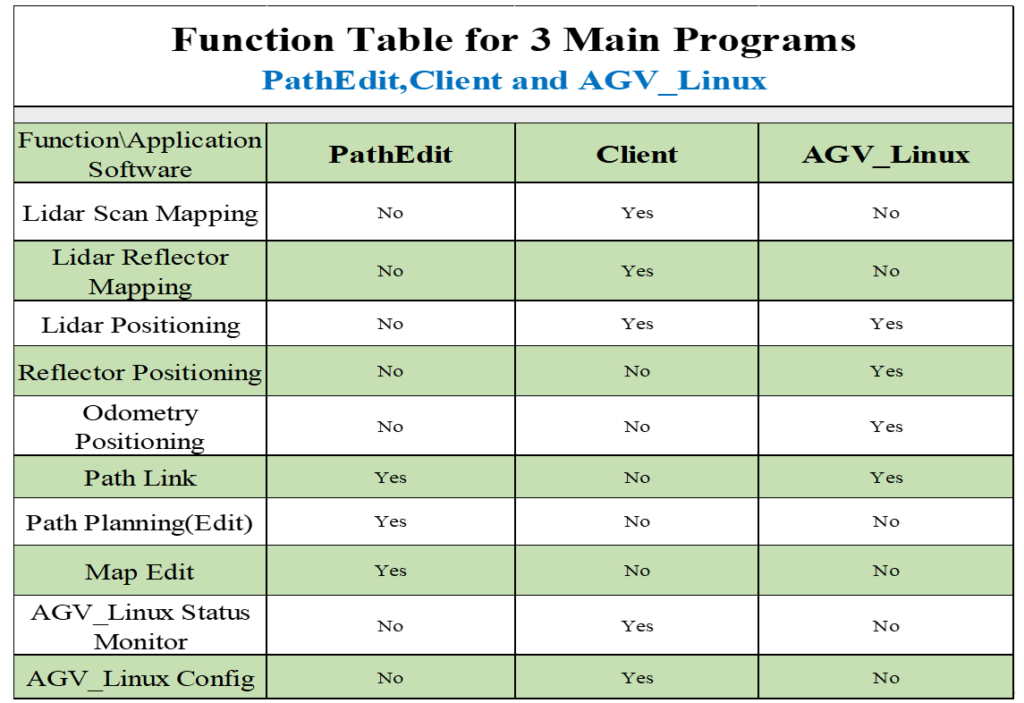
CoRo SLAM is a navigation software developed by CoRo Digital for AGV/AMR mapping and driving. It Contains three main programs: Client, PathEdit, AGV_linux.
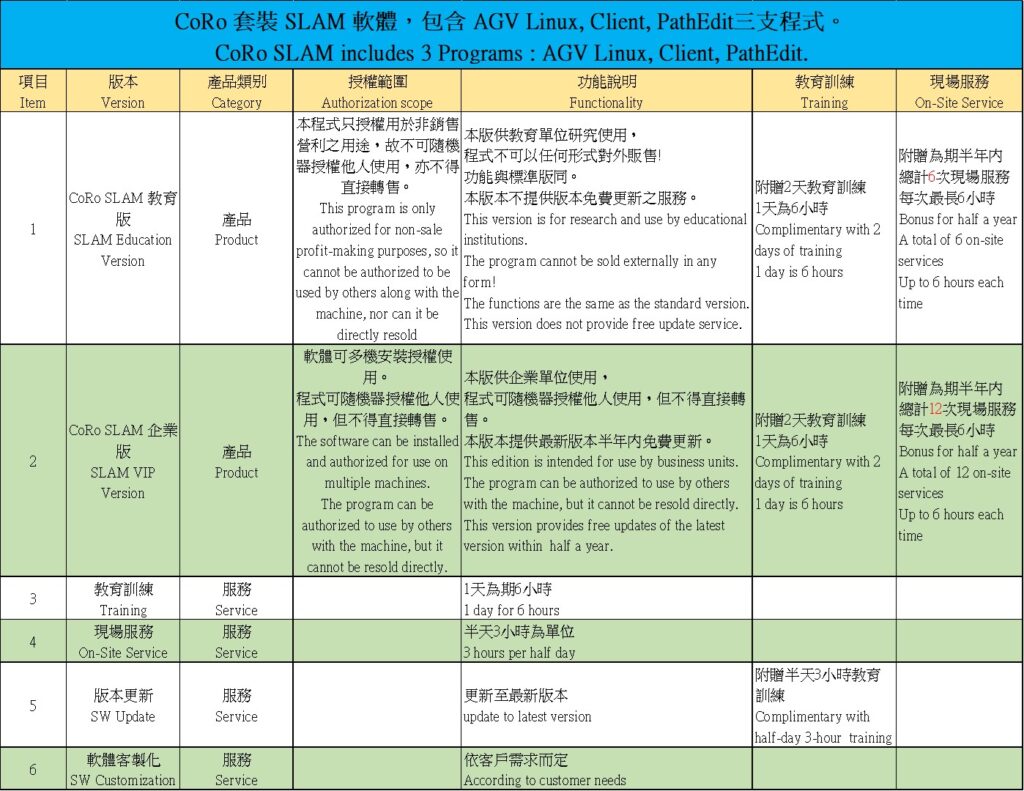
About Software Licensing
The sales method is mainly to authorize the right to use the CoRo SLAM software, pay a one-time fee, and give a registration password. The purchaser is the authorized unit, and the authorized unit can repeatedly install and use the software.
Scope of Authorization and Prohibition
Authorized units can assist machine buyers to install, register and use CoRo SLAM. The authorized unit shall not directly resell the right to use the software or authorize others to use it. The registration password is only used by the initial purchaser, and third-party registration is not allowed.
CoRo SLAM Features :
* AGV/ AMR unmanned vehicle, lidar navigation, mapping, positioning and navigation
* Lidar : SICK Lidar or PEPPERL+FUCHS Lidar
* Natural contour positioning accuracy (+/-)2cm, Enable OdoFilter(+/-)1cm
* AMR/ AGV moving speed 1m/sec (customization can be up)
* Path planning can choose multi-path PathLink or AB two-point route
* Forward, backward, in situ rotation, obstacle avoidance distance adjustment
* Lidar can be single or double-lidar positioning
* Provide 2 mapping methods (1) Real-time mapping (2) Calculate data and map after collected data
* Map data can be exported and imported into Text File
* Support wheel Odometry, encoder and gyroscope positioning navigation (IMU)
* Support reflector positioning Reflector, no matter about dynamic environments
* Support ten maps. Each map can be up to 40,000 square meters


Mapping
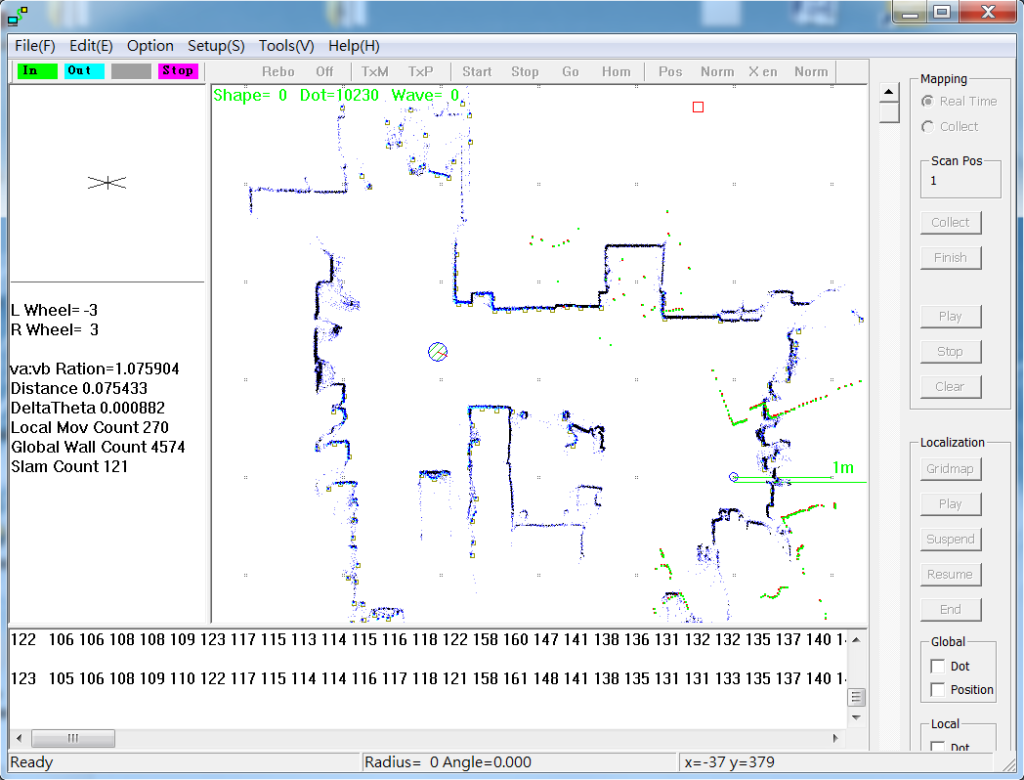
Robot indoor mapping, using Wifi remote control robot, mouse remote control technology
Using SLAM technology, ICP (Iterative Closest Point) algorithm,
Superimpose each scanned map to complete the entire spatial map step by step
After the indoor environment is completely scanned, input it into the editing software, and then plan the path
There are two ways to build a map:
- Real-time map building: The robot walks the path and builds maps in real time along the way
- Collective map construction: After the robot walks the entire distance, it calculates the collected data to complete the map construction`
- Support LoopClosure, reflectors
Localization &Navigating
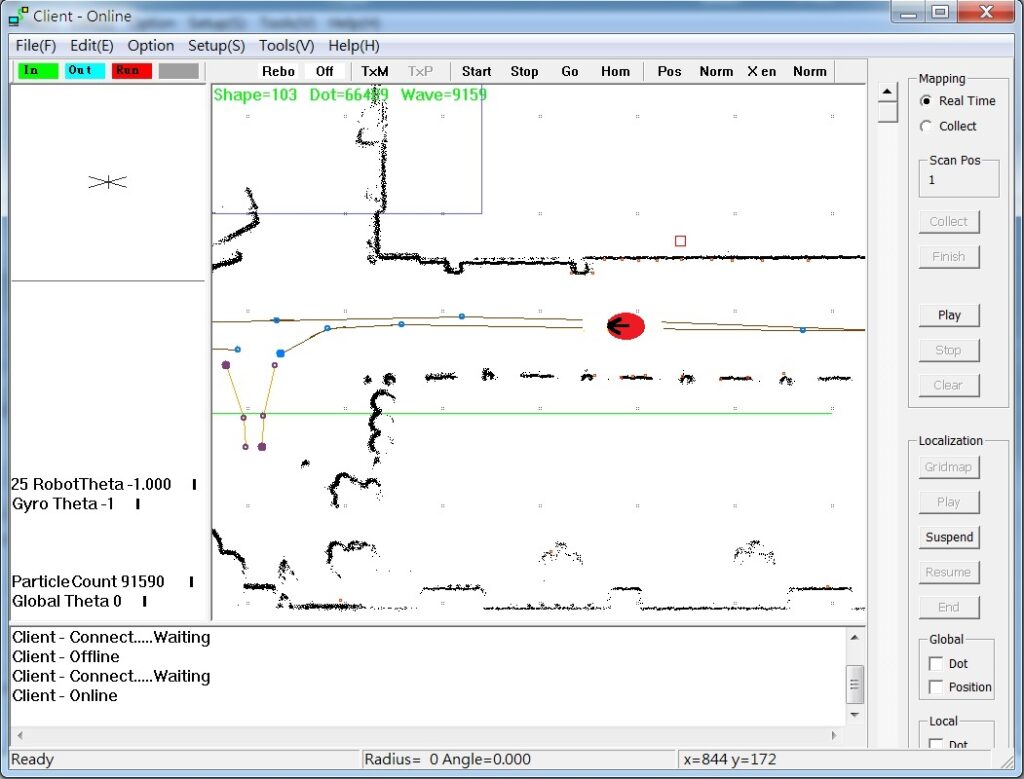
The invention of robot positioning technology has greatly advanced the technological milestone,
From household sweepers, unmanned vans, to future robots must be used,
The robot scans the space through the robot’s eyes, 360/270-degree lidar
Then compare the previously established map to know where the robot coordinates are in the map,
Through the Client application, monitor and grasp where the robot is and where it will go all the time
Use the Particle Filter algorithm to calculate coordinates, a fast and easy-to-use algorithm
When the sensor is blocked, the unmanned van will automatically switch to the rice wheel (double wheel) positioning
Temporary use of wheel alignment, the truck continues to move until the sensor re-identifies
After terrain, it will switch back to laser lidar positioning
Robot AGV unmanned guided vehicle route planning, robot speed adjustable, smoother curved path
No magnetic strip, no construction required, easy system installation
Path planning is more flexible, use computer to plan path
Laser area protection can be used when the robot is automatically navigating, with warning and emergency stop
Path Edit & Map Edit
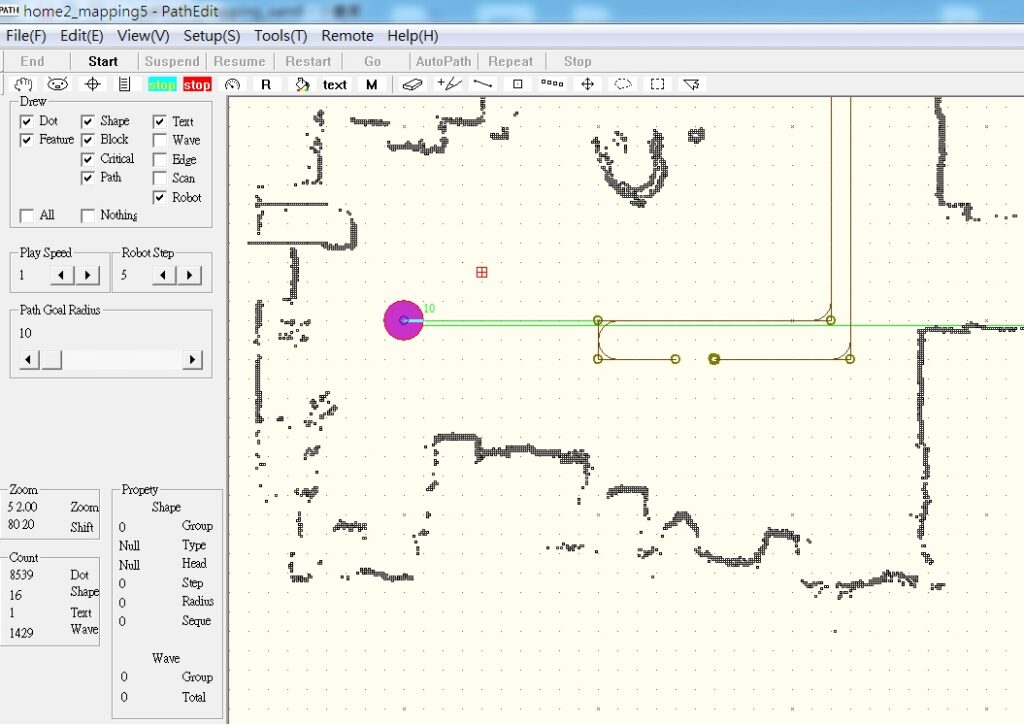
Path planning and editing
PathEdit path editor is a professional SLAM editing software
Or add, remove, and modify the map content to quickly complete the robot path
Use the function of exporting (EXPORT) or importing (IMPORT) a text file, and then use a text editor to modify the content
Make data processing more flexible, transparent and editable
CoRo SLAM
Architecture Diagram
Products & Authorization