AMR自走車SLAM導航軟體客製化設計
AMR影片分享
關於CoRo SLAM軟體說明
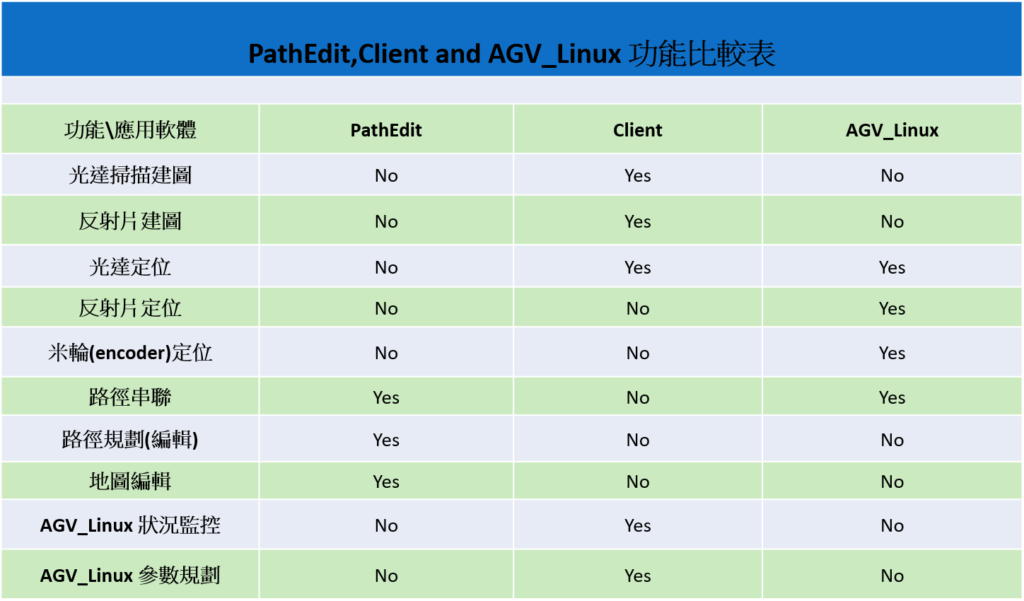
CoRo SLAM是 鈳洛數位 CoRo Digital 開發的一款用於AGV/AMR的建圖和驅動的導航軟體。包含三支主程式: Client, PathEdit, AGV_linux。
SLAM簡介
Simultaneous localization and mapping
即時定位與地圖構建
AGV AMR 無人搬運車 , 雷射導航 , 地圖定位導航
Lidar Slam Navigation
* 激光雷達 SICK Lidar 或 PEPPERL+FUCHS Lidar
* 定位精度(+/-)2cm , Enable OdoFilter(+/-)1cm
* AMR AGV移動速度1m/sec
* 路徑規劃可選擇多重路徑PathLink或AB兩點最短規劃路線
* 前進,後退,原地旋轉,避障距離調整
* 激光雷達可選擇單一激光雷達或雙激光雷達定位
* 提供2種建圖方法(1)即時建圖(2)收集資料結束後再計算資料建圖
* 地圖資料可匯出,匯入Text File
* 支援車輪定位Odometry,編碼器與陀螺儀(TL740D)定位導航(IMU),
* 支援反光板定位Reflector
* 支援十張地圖,可分樓層使用
* 支援回環地圖誤差修正 LoopClosure


Mapping 建圖
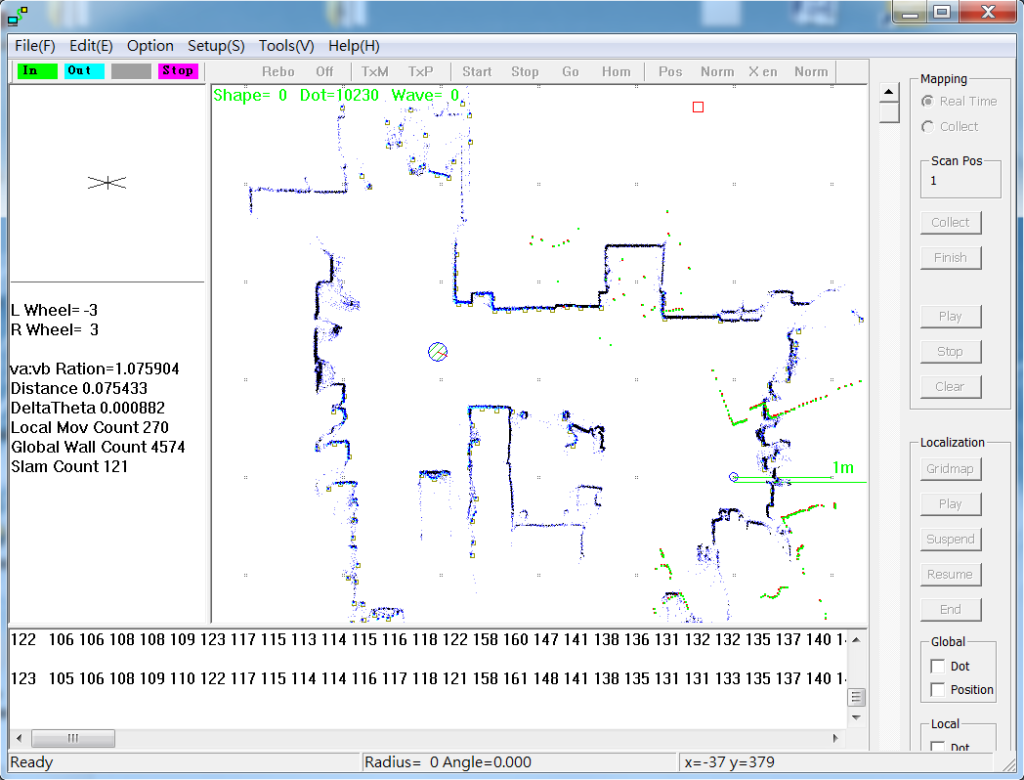
機器人室內地圖建立,使用Wifi遙控機器人,滑鼠遙控技術
使用SLAM技術,ICP(Iterative Closest Point)演算法,
將每張掃描的地圖疊合,一步一步完成整個空間地圖
當室內環境完全掃描後,輸入至編輯軟體,再進行路徑規劃
建圖方式有二種:
1.即時式建圖: 機器人走過路徑,沿途即時建圖
2.收集式建圖: 機器人走完全程後,運算收集的資料完成建圖`
支援LoopClosure,反光板
Localization &Navigating
定位&導航
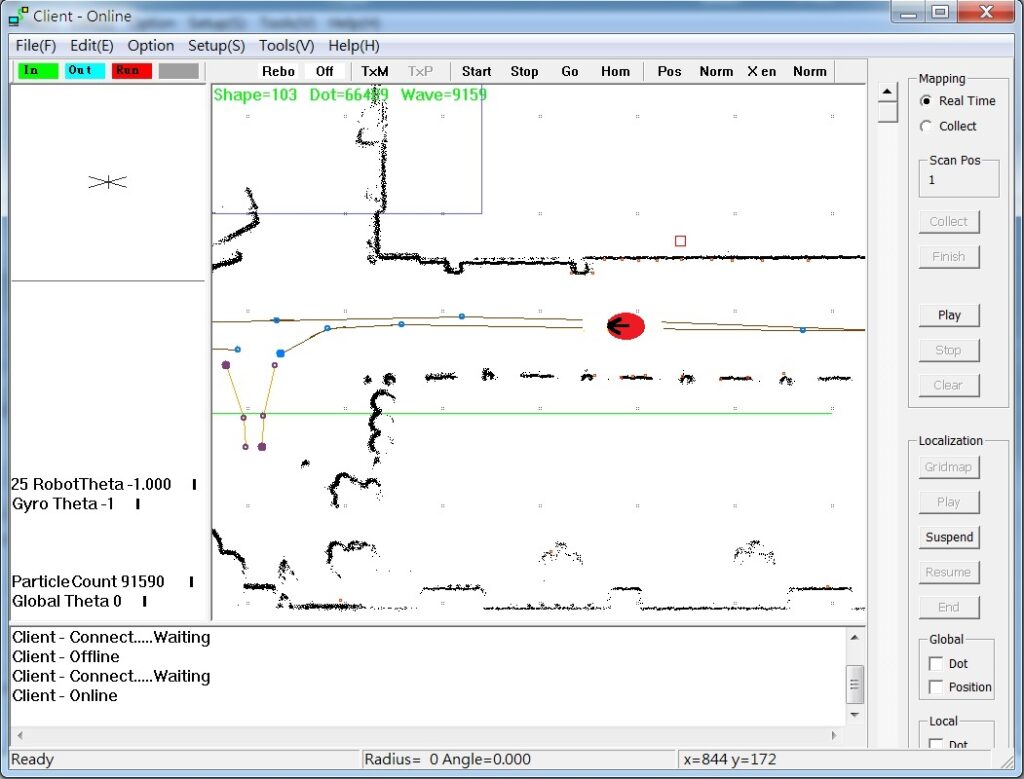
機器人的定位技術的發明,大大的推進科技里程碑,
從家用掃地機,無人搬運車,到未來的機器人都必須使用到,
機器人透過機器人的眼睛,360/270度的激光雷達,掃描空間
再比對先前建立好的地圖得知機器人座標在地圖中哪裡,
透過Client應用程式,時時刻刻監控掌握機器人正在何處,將會去哪裡
使用 Particle Filter 演算法計算座標,快速又好用的演算法
無人搬運車在感測器被遮避時會自動切換到米輪(雙輪)定位
暫時使用車輪定位,搬運車可持續移動,移動到感測器重新辨認出
地形後會切換回雷射激光雷達定位
Robot AGV 無人搬運車路線規劃,機器人速度可調,曲線路徑更流暢
不使用磁條,不需施工,系統安裝方便
路徑規劃更有彈性,使用電腦規劃路徑
機器人自動導航時可使用雷射區域防護,有警告與警急停止
PathEdit 路徑編輯
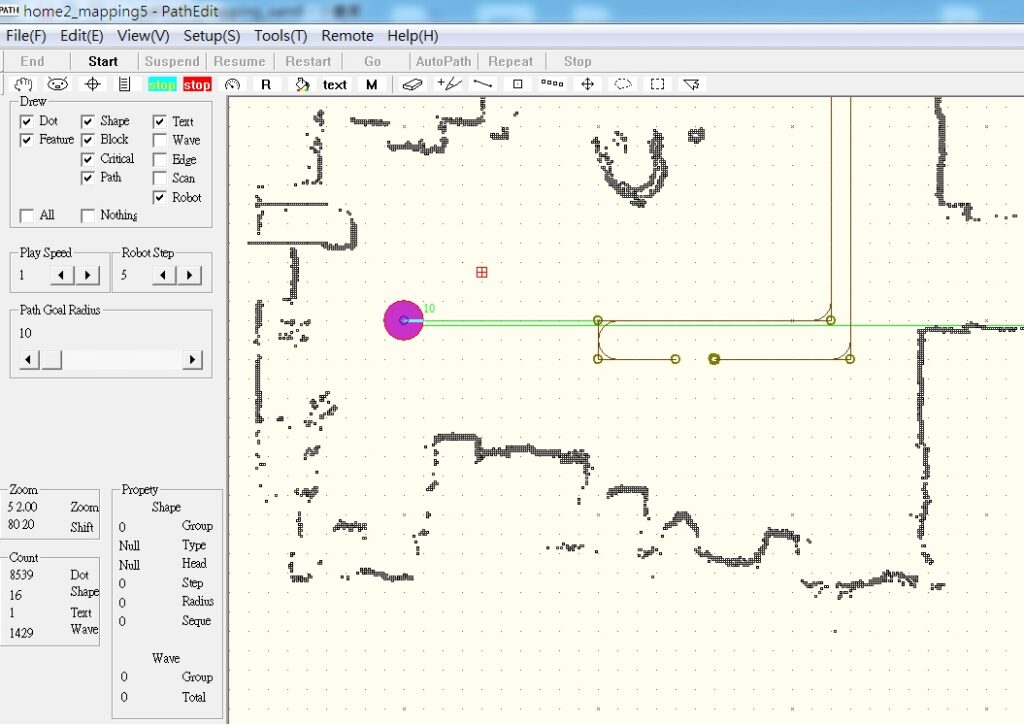
Path planning and edit
PathEdit路徑編輯器是專業的SLAM編輯軟體
或是增加,移除,修改地圖內容,可快速完成機器人路徑
使用匯出(EXPORT)或匯入(IMPORT)文字檔的功能,再使用文字編輯器修改內容
讓資料處理更有彈性,透明性,編輯性
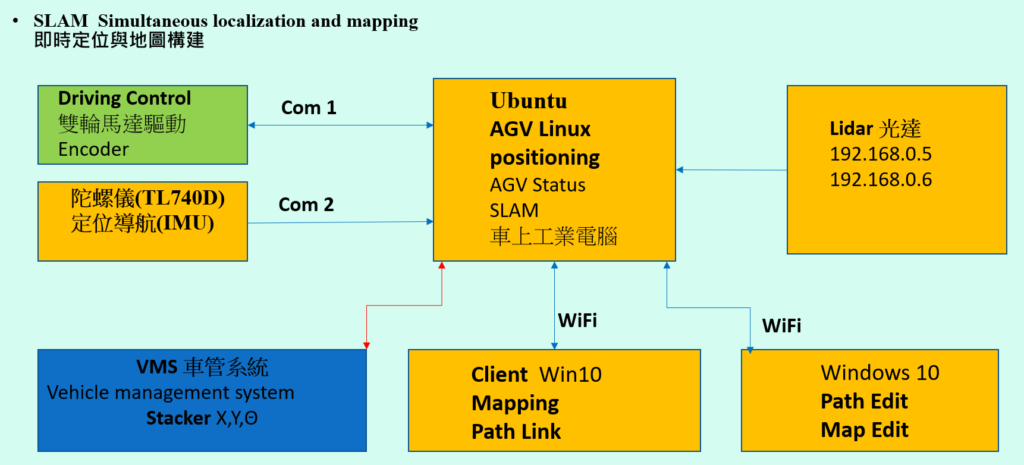
SLAM 功能區塊圖
3應用程式比較表
配備建議
建議使用無風散電腦I7-6600U或Atom-E3845,需有兩個RS232兩個Ethernet,Memory8~16G
車輪定位Odometry,編碼器(1024 pulses)與陀螺儀(TL740D)定位導航(IMU)
Lidar : 360/270度的激光雷達